いや、サボってたわけじゃないです。近頃話題のまど☆マギも1周しか見てないです。
ロボ手首の構造はどうあるべきなのか?というところで大いに悩んでしまって。
そのもとになっている人間の手首の構造は、自分自身の手と骨格標本でも見れば分かるんですが、それを機械で再現するとどんな構造になるんだろう?というのがなかなか掴めなかったのです。
いちばんの問題が親指でして、自分の指を動かしてみると、手の根元から延びた骨がすべて筋肉に包まれて動きを得る構造になっているのが分かります。これを機械で作ると、どこがどういう運動をしたらその動きを再現できるのか?という部分でどうしても引っかかりが出てしまうんです。
プラモの可動指はその辺全然考えられていないのが一目で分かりますし、2次元用のアニメ設定はもちろんアテにならない。
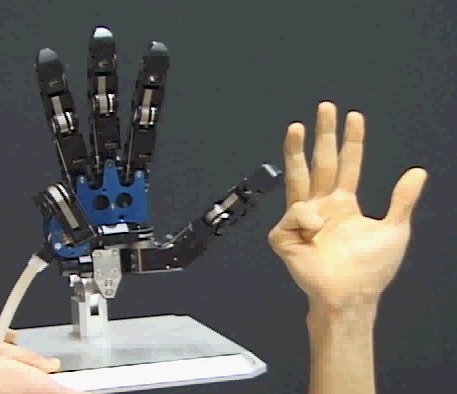
どうもこの「メカ親指問題」は過去ずっとテキトーに流されてきた、いやあきらめられてきたフシがあります。では現実はどうなのか?タマゴも割らずに掴むロボットマニュピレータとかあったんじゃないか?と思い画像を探してみましたが、それらにおいても親指に関しては完全再現する気がないのが分かってきます。
いや、動きに関してはイイ線行くだろうとは思うんですが、問題はそのフォルム。
なまじ我々の体に付いている部品だけに、ちょっとフォルムが崩れると突然人間のモノではなくなってしまう。ハッキリ言ってしまうと畸形に見えてしまうんです。
見た目が全ての模型屋さんとしては、今度は畸形には困っちまうわけです。言葉が過ぎるって言ったってしょうがないよ。

タマゴも持てる人。なかなかいいフォルムですが・・・

このポーズだと残念・・・
これとか、

これとか、よく動きそうですがもはや平手がキモチワルイ。
そこで、と言って出すと恐ろしくハードルが上がるわけですが、いろいろ悩んだ結果、親指付け根は回転軸がよろしいんじゃないかと今んとこ思います。


手のひら側と指側の接合面がそれぞれ3次元的断面になります。これが脳みその中では全然思い浮かばない。現物作って貼付けるまで善し悪しが分からんのです。これはセンスの問題か?
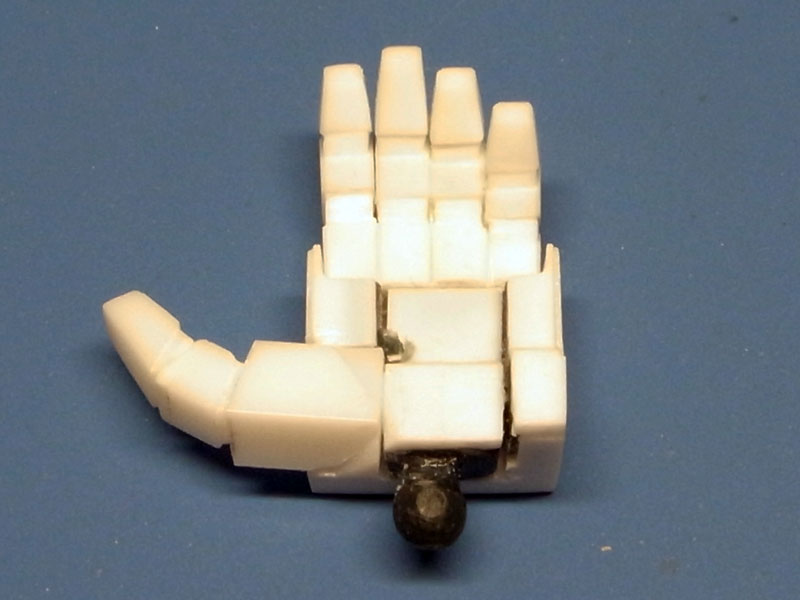

角度を変えて仮止めしてみます。これまで試した中ではいちばん破綻していません。

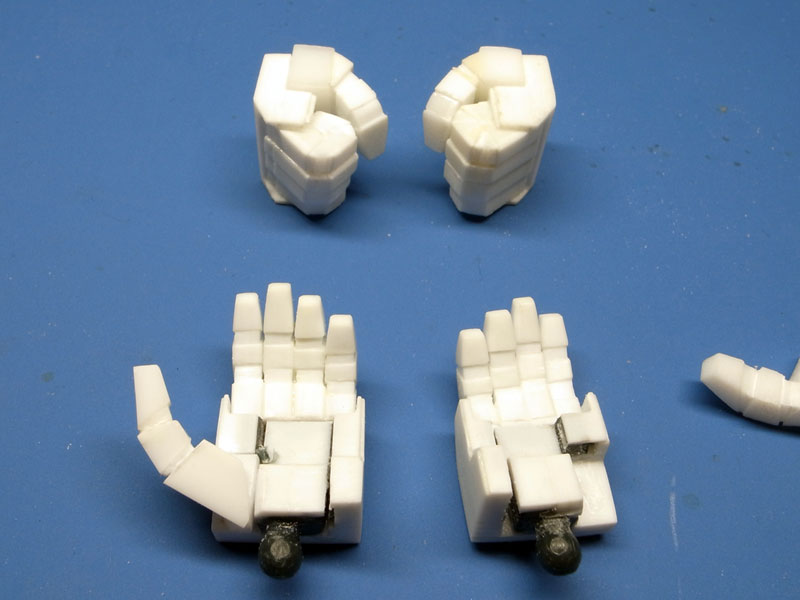
とりあえずこれでいきたいと思います。
まだまだ親指接合部の角度が出せただけで、太さや位置、ディテールなどはこれからです。
グーの方もこれっぽく直さないと。
最後に、こんなちっこいパーツに一体何をやってるんだ?とお思いでしょうが、期限区切られて金もらってやってるわけじゃないので、納得いかない部分があると前に進めなくなっちゃうんです。